Микроконтроллеры
Cамодельный робот пылесос на микроконтроллере Atmega8
- Подробности
- Категория: Микроконтроллеры
- Опубликовано 25.11.2015 17:55
- Автор: Admin
- Просмотров: 6067
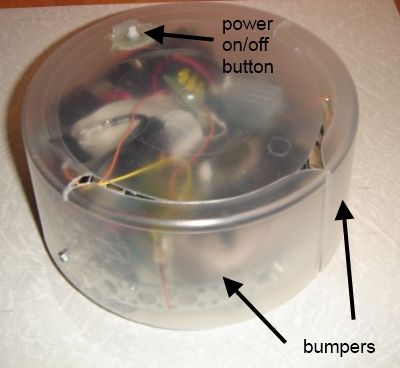
В данной статье представлен проект самодельного простого робота пылесоса на микроконтроллере Atmega8. Конечно идеально чистой он вашу квартиру не сделает но пыли и мелкого мусора чуток соберет. Ориентация в пространстве, если конечно это можно так назвать, осуществляется при помощи кнопок расположенных в передней части робота - это своего рода зрение робота. Как только на пути робота появляется препятствии кнопка замыкается и сигнал поступает в микроконтроллере который в свою очередь меняет направление движения робота.
Схема простого робота-пылесоса на микроконтроллере
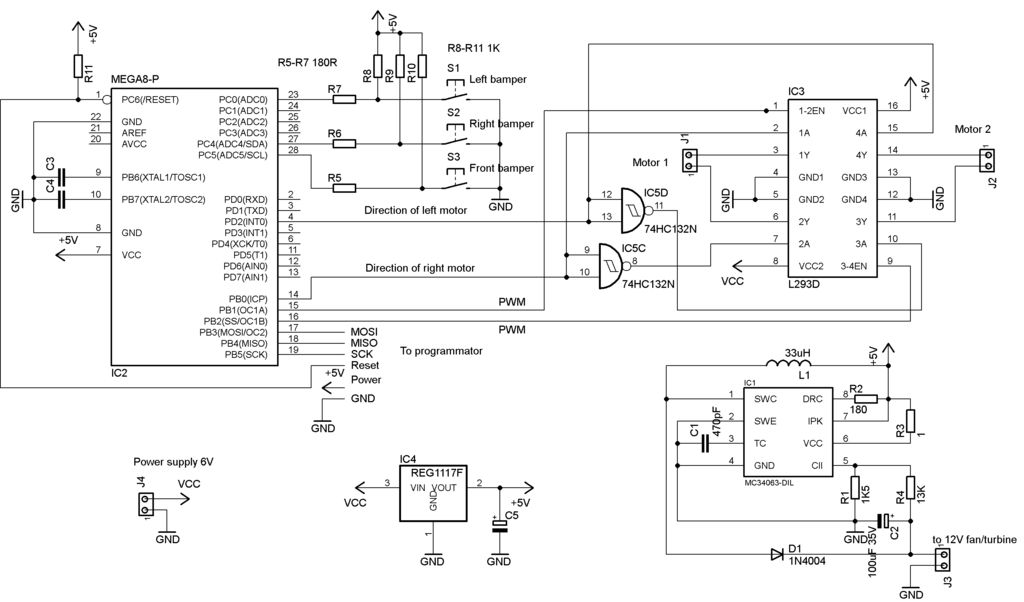
Питание схемы осуществлятеся от 6 вольтового аккумулятора. Управление осуществляется при помощи ШИМ сигналов который поступают на вход драйвера микросхемы L293D. Робот имеет 3 кнопки которые механически соеденины с "бамперами" робота на его корпусе.
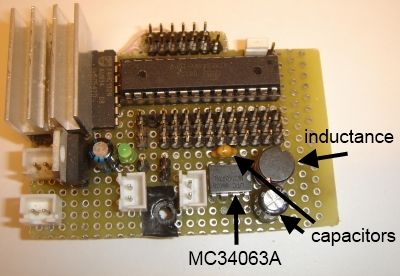
Двигатели постоянного тока управляются при помощи драйвера шагового двигателя собранного на микросхеме LD293D. Внешний вид собранной печатной платы представлен на рисунке ниже.
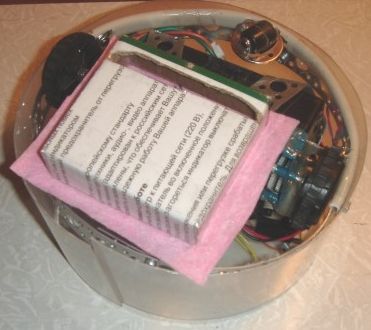
В качестве корпуса робота подойдет какая нибудь пластиковая емкость в примере использовано ведерко

В качестве механики были использованы колеса и моторчики от игрушечного автомобиля вы можете использовать абсолутно любую механику все ограничено лишь вашей фантазией.

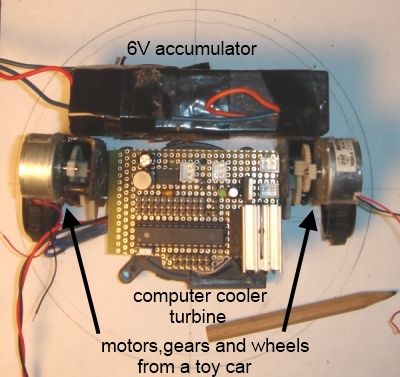
Всасывающая часто сделана на кортоном каркасе и всасывающего куллера в качестве фильтра выступает обычная салфетка.


Кнопки кнопки нажимаются при помощи "бамперов"
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Новости радиомира
-
Арматура 6 мм: Применение, преимущества и советы по выбору
-
В прямом эфире: Остроумная комедия Ниши Ганатра о переменах, инклюзивности и второй жизни ночного шоу
-
Важность инженерно-геодезических изысканий в строительных проектах
-
Миниатюрный радиоприемник на основе графена
-
Покупка Квартиры в Анжеро-Судженске: Инвестиция в Комфорт и Уют
-
Сад падающих звёзд: Тайваньская дорама, покорившая сердца зрителей по всему миру
-
Саранск: История, Культура и Жилье в Современном Городе
-
Что такое роялти во франшизе простыми словами
Комментарии