Робот своими руками. Часть 3
- Подробности
- Категория: Arduino
- Создано 29.11.2013 14:41
- Автор: Admin
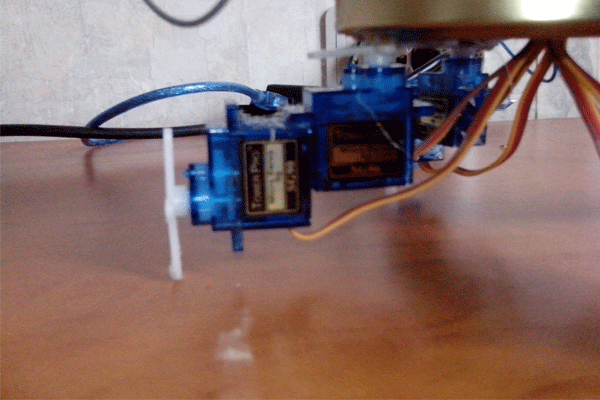
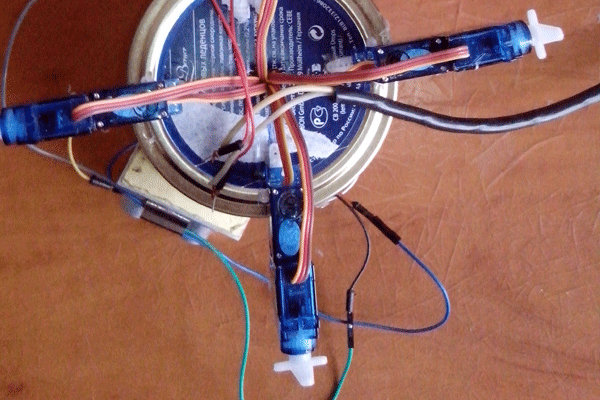
После того как сделал робота, пришел к выводу что данная конструкция не очень пригодна для ходьбы робота, а точнее возникили некоторые трудности при написании алгоритма движения. Пришлось ее изменить переклеев сервоприводы следующим образом.
Внешний вид ноги на сервоприводах
Алгоритм движения робота на Arduino
В качестве алгоритма движения использовал схожий проект робота с 4-мя ногами. Автор использовал 3 привода на одну ногу и в качестве контроллера взял Atmega328 с прошитым загрузчиком. Данный робот умеет поворачивать направо, налево,может ходить назад имеет зрение в виде ультразвукового датчика. Для упрощения программирования и подключения к плате Arduino каждому сервоприводу присвоим определенное название.
- верхней фронтальной правой серве присвоим название rightfront1;
- верхней фронтальной левой серве присвоим название leftfront1;
- верхней задней правой серве присвоим название rightback1;
- верхней фронтальной левой серве присвоим название leftback1.
Аналогично присваиваются названия нижним сервоприровам
- нижней фронтальной правой серве присвоим название rightback2;
- нижней фронтальной левой серве присвоим название leftfback2;
- нижней задней правой серве присвоим название rightback2;
- нижней задней левой серве присвоим название leftback2.
В коде автора сервоприводы названы аналогичным образом.
Мой робот имеет 2 сервы на одну ногу, поэтому было решено к нижним сервоприводам подключить к тому выводу который отвечал за колено в проекте автора. Куда что подключать ясно из исходного кожа программы.
Ультразвуковой сенсор подсоединяется к выводам A0 и A1.
Скетч самодельного робота на Arduino. Данный скетч позволяет подключать 3 сервопривода на одну ногу. В нашем случае 3-й просто не подключается.
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Комментарии
Под видео добавил скетч.