Робот своими руками. Часть 2
- Подробности
- Категория: Arduino
- Создано 29.11.2013 14:41
- Автор: Admin
Продолжаем конструировать нашего робота и в данной статье попробую как можно подробнее описать как его делал я. О ответить на вопрос "как сделать робота?"
Делаем ноги для робота
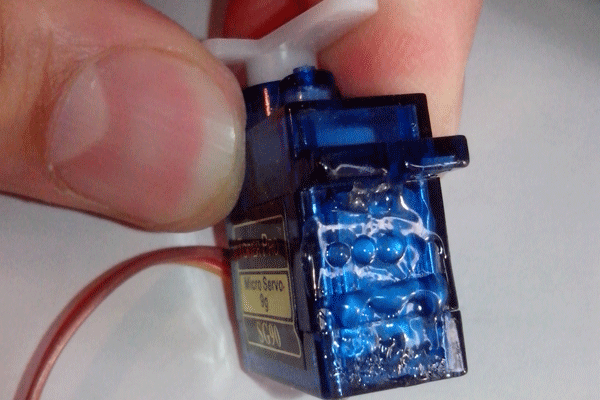
Нам понадобиться 4 ноги, на каждую ногу под 2 сервопривода, итого 8 штук. Как придет остальная партия сервоприводов, сразу модернизирую робота, добавив еще по одной приводу на каждую ногу. Перед тем как устанавливать привод, нужно убедиться что его положение выставлено в 90 градусов. Так как показано на рисунке ниже. Можно предварительно установить положение при помощи Arduino с помощью конструкции servo.write(90).

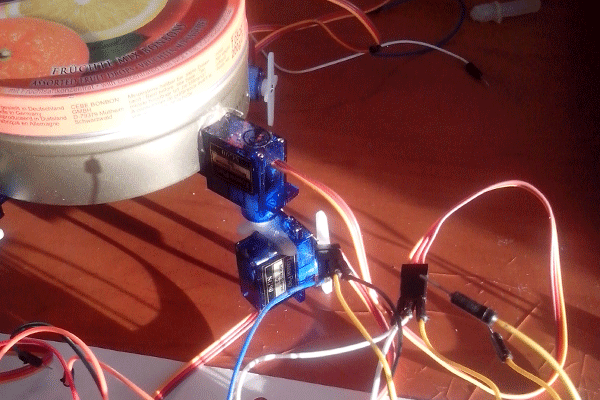
Нога состоит из двух сервоприводов склеенных между собой. Сначала намазываем слоем нашего "волшебного" пластика один сервопривод.
Сначала нужно расплавить пластик, для это я использовал обычную зажигалку. После того как он расплавился присоединяем к нему другой сервопривод.
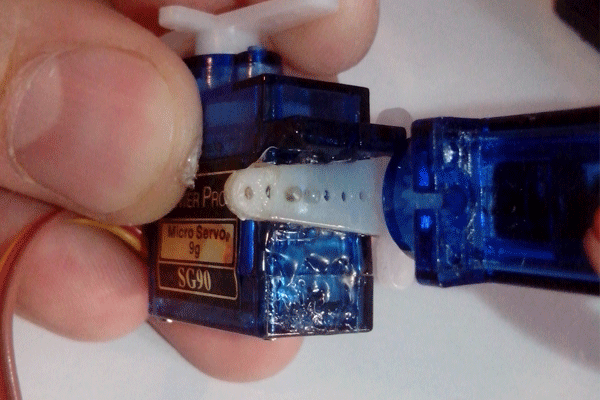
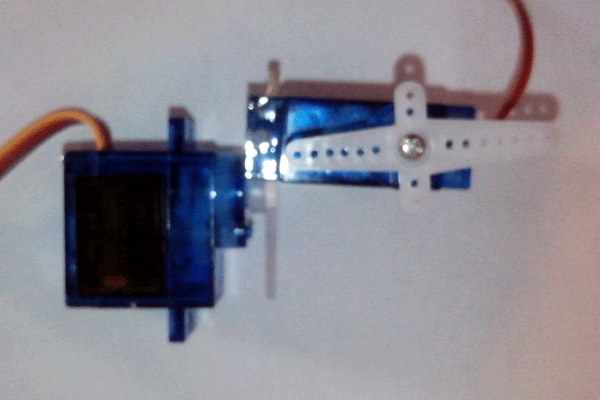
Может это не самое лучшее решение, но я решил сделать так. Можно конечно сделать и по другому но для этого нужно будет придумывать новый алгоритм движения и переписывать всю программу. Итак первая нога готово, аналогично собираються оставшиеся 3 штуки.
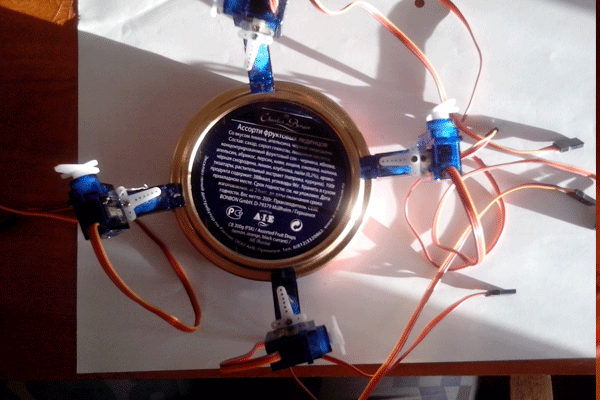
Присоединяем ноги робота к каркасу
В качестве каркаса как я и говорил использовал банку. Намазываем ее с 4-х сторон нашим пластиком с помощью клеевого термопистолета. Далее нагреваем и приделываем ноги.



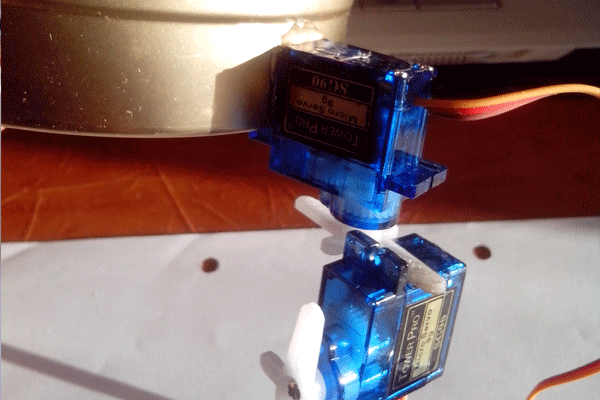
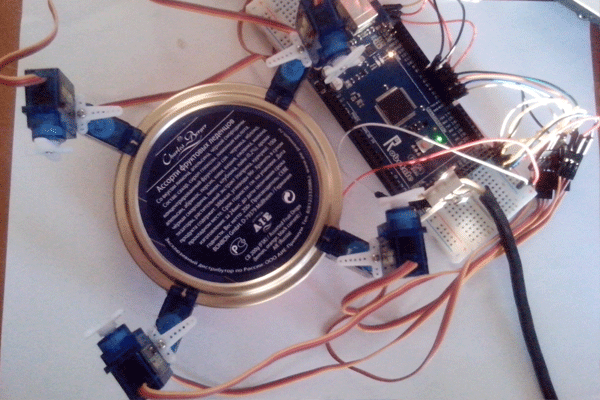
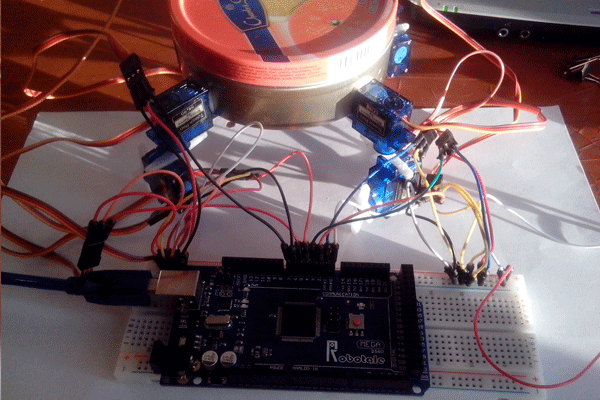
После того как присоеденили все сервоприводы должно получиться следующее:
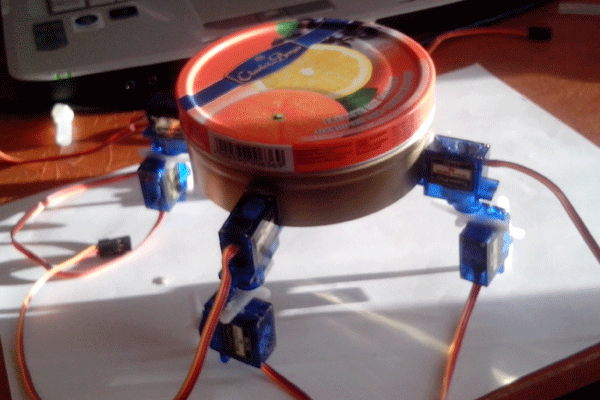
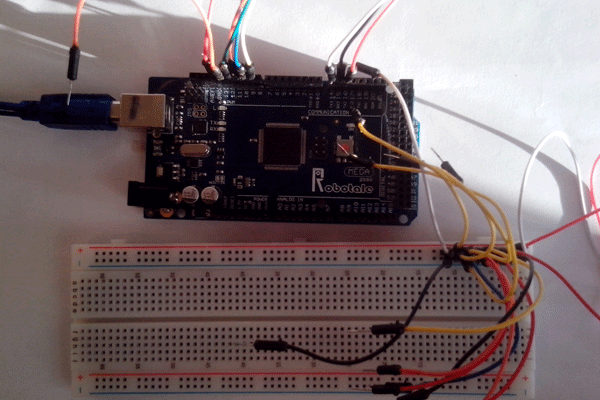
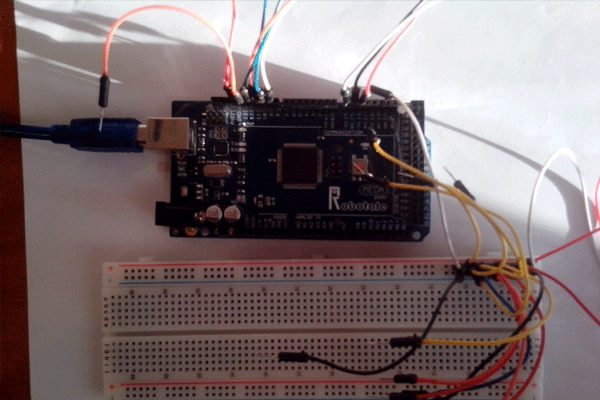
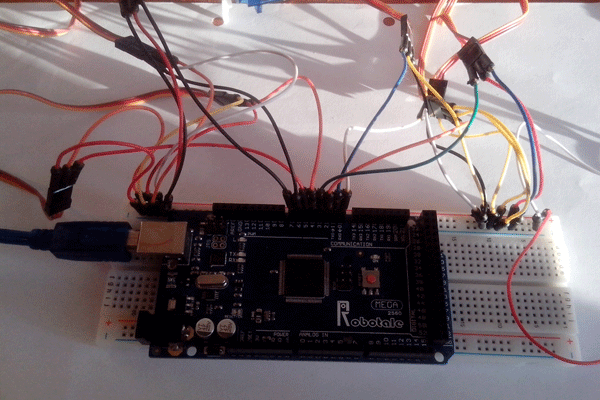
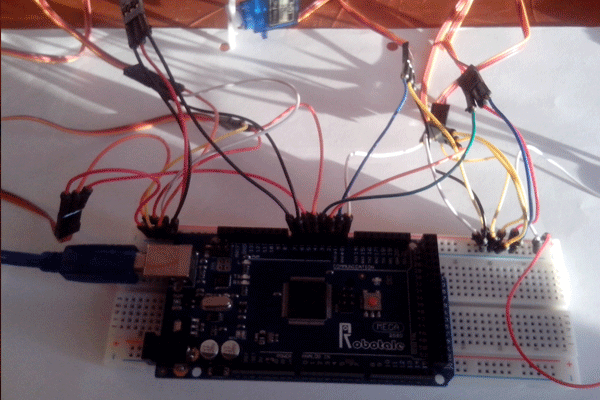
Осталось дело за малым, это присоеденить все провода к плате Arduino. На плате у меня использовывались выводы с 0-го по 7-й. Это управляющие выводы которые подключаютсья к желтому проводу привода. Схему приводить не буду, тут и так все понятно.
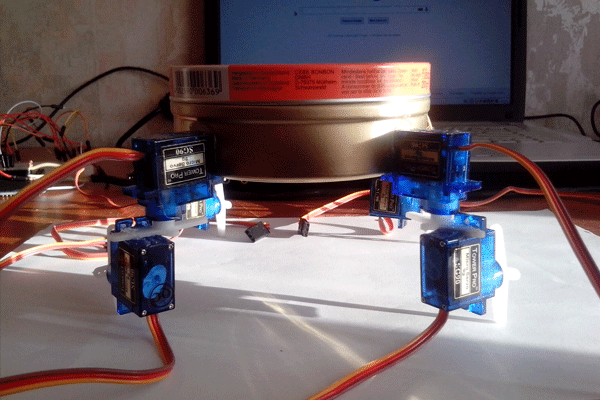
Что получили в итоге
Движение ног пока хаотичное - своего рода демонстрация работоспособности. В следующей части начнем программировать его движения. Дадим нашему роботу мозги. Пока нет и малейшего представления как я это буду делать, но уверен что все получится) Думаю в дальнейшем установить ему ультразвуковой дальномер на крышу чтобы препятствия обходил.
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Новости радиомира
-
Арматура 6 мм: Применение, преимущества и советы по выбору
-
В прямом эфире: Остроумная комедия Ниши Ганатра о переменах, инклюзивности и второй жизни ночного шоу
-
Важность инженерно-геодезических изысканий в строительных проектах
-
Миниатюрный радиоприемник на основе графена
-
Покупка Квартиры в Анжеро-Судженске: Инвестиция в Комфорт и Уют
-
Сад падающих звёзд: Тайваньская дорама, покорившая сердца зрителей по всему миру
-
Саранск: История, Культура и Жилье в Современном Городе
-
Что такое роялти во франшизе простыми словами