Arduino и шаговый двигатель
- Подробности
- Категория: Arduino
- Опубликовано 31.10.2015 10:11
- Автор: Admin
- Просмотров: 11844
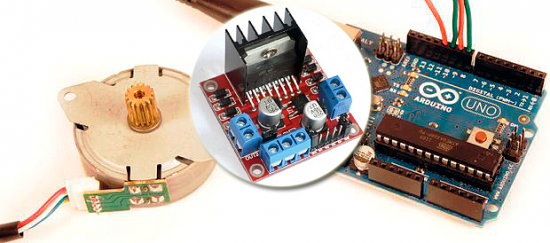
В данном уроке мы будем подключать шаговый двигатель к arduino. Помимо самого ШД и arduino нам в первую очередь понадобится драйвер шагового двигателя. на микросхеме L298. Такой драйвер можно приобрести в зарубежных интернет магазинах за небольшую сумму.
Шаговый двигатель
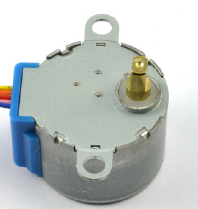 Использую шаговый двигатель можно точно спозиционировать положение вала, поворот вала осуществляется на определенный угол по "шагам". Также ШД может удерживать текущую позицию, даже при наличии обратного крутящего момента на валу. Они бывают 2-х типов: униполярные и биполярные. Лучшими силовыми характеристиками обладают биполярные двигатели. Биполятрные двигатель имеет 4 провода, которые подключены к 2-м наборам внутренних электромагнитных катушек. Направление вращения вала ШД осуществляется путем изменения направления тока в катушках.
Использую шаговый двигатель можно точно спозиционировать положение вала, поворот вала осуществляется на определенный угол по "шагам". Также ШД может удерживать текущую позицию, даже при наличии обратного крутящего момента на валу. Они бывают 2-х типов: униполярные и биполярные. Лучшими силовыми характеристиками обладают биполярные двигатели. Биполятрные двигатель имеет 4 провода, которые подключены к 2-м наборам внутренних электромагнитных катушек. Направление вращения вала ШД осуществляется путем изменения направления тока в катушках.
Драйвер шагового двигателя

Для того чтобы управлять ШД нельзя взять и просто подать постоянное напряжение - он работать не будет. Для его работы необходим модуль или драйвер шагового двигателя. При помощи его можно осуществлять контроль над скоростью вращения и напрявлением вала двигателя. В нашем примере используется модуль на микросхеме L298H. Но существую также и другие варианты драйвера на других микросхемах.
Контроллер Arduino
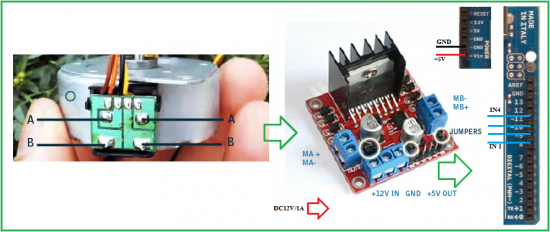
В нашем примере в качестве контроллера выступает Arduino UNO но можно также использовать и другие платы. На шаговом двигателе есть 2 пары проводов, первая пара A,A+ на двигателе подключается к выводам МА,МА+ на контроллере. Аналогично и другая пара B,B+ на двигателе подключается к выводам МB,МB+ на контроллер ШД. Подключение напряжения осуществляется к выводам +12V, GND и +5V. GND - общий минусовой провод, +12V необходимо для питания двигателя а +5V для питания самого драйвера ШД. Управляющие выводы IN1,IN2,IN3,IN4 подключаются к выводам D8,D9,D10,D11 соответственно. По этим проводам передаются управляющие сигналы, которые представляют собой импульсы.
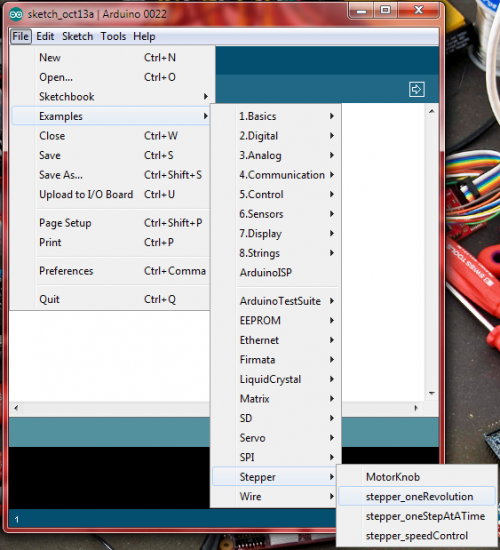
Далее нам необходимо залить саму программу, она есть в готовых примерах среды Arduino и называется stepper_oneRevolution.
Код программы управления шаговым двигателем
#include
const int stepsPerRevolution = 200; // steps per revolution of your motor
// initialize the stepper library on pins 8 through 11:
Stepper myStepper(stepsPerRevolution, 8,9,10,11);
void setup() {
// set the speed at 60 rpm:
myStepper.setSpeed(60);
// initialize the serial port:
Serial.begin(9600);
}
void loop() {
// step one revolution in one direction:
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// step one revolution in the other direction:
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
} Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Новости радиомира
-
Арматура 6 мм: Применение, преимущества и советы по выбору
-
В прямом эфире: Остроумная комедия Ниши Ганатра о переменах, инклюзивности и второй жизни ночного шоу
-
Важность инженерно-геодезических изысканий в строительных проектах
-
Миниатюрный радиоприемник на основе графена
-
Покупка Квартиры в Анжеро-Судженске: Инвестиция в Комфорт и Уют
-
Сад падающих звёзд: Тайваньская дорама, покорившая сердца зрителей по всему миру
-
Саранск: История, Культура и Жилье в Современном Городе
-
Что такое роялти во франшизе простыми словами