Солнечный трекер на Arduino
- Подробности
- Категория: Arduino
- Опубликовано 29.11.2013 14:41
- Автор: Admin
- Просмотров: 12062
Солнечный трекер позволяет отслеживать текущее положение источника света и корректировать угол поворота сенсоров таким образом, чтобы поток солнечного света на них был максимален. В качестве сенсоров выступают два фоторезистора.
Схема солнечного трекера
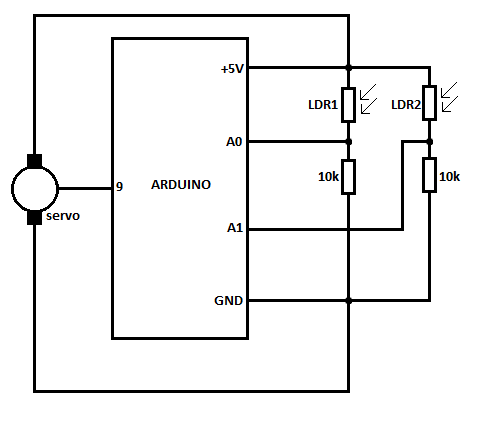
Схема состоит из одного сервопривода и 2-х фоторезисторов. Фоторезисторы меняют свое сопротивление в зависимости от падающего света, далее происходит сравнение этих двух величин. И в зависимости от того где полученное цифровое значение больше туда и происходит поворот сервопривода.
Поворот осуществляется до тех пор, пока цифровое значение света обоих фоторезисторов не уровняется. Другими словами сервопривод солнечного трекера перестанет поворачиваться, когда свет будет одинаково падать на оба фоторезистора. Ниже приведен небольшой код трекера из которого все понятно, что происходит.
Полученные значения сохраняются в переменные val1 и val2, далее происходит их сравнение. Если они равны то солнечный трекер находиться в покое, а если их разница больше или меньше нуля, то сервопривод начинает работать.
Фоторезисторы подключены по схеме делителя напряжения, через дополнительное сопротивление в 10 кОм подключенные к земле. При изменении сопротивления фоторезисторов, меняеться напряжение на вывода A0 и A1 платы Arduino.
Код программы
#include Servo myservo;
int pos = 90; // initial position int sens1 = A0; // LRD 1 pin int sens2 = A1; //LDR 2 pin int tolerance = 2; void setup() { myservo.attach(9); // attaches the servo on pin 9 to the servo object pinMode(sens1, INPUT); pinMode(sens2, INPUT); myservo.write(pos); delay(2000); // a 2 seconds delay while we position the solar panel } void loop() { int val1 = analogRead(sens1); // read the value of sensor 1 int val2 = analogRead(sens2); // read the value of sensor 2 if((abs(val1 - val2) <= tolerance) || (abs(val2 - val1) <= tolerance)) { //do nothing if the difference between values is within the tolerance limit } else { if(val1 > val2) { pos = --pos; } if(val1 < val2) { pos = ++pos; } } if(pos > 180) { pos = 180; } // reset to 180 if it goes higher if(pos < 0) { pos = 0; } // reset to 0 if it goes lower myservo.write(pos); // write the position to servo delay(50); }
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Новости радиомира
-
Арматура 6 мм: Применение, преимущества и советы по выбору
-
В прямом эфире: Остроумная комедия Ниши Ганатра о переменах, инклюзивности и второй жизни ночного шоу
-
Важность инженерно-геодезических изысканий в строительных проектах
-
Миниатюрный радиоприемник на основе графена
-
Покупка Квартиры в Анжеро-Судженске: Инвестиция в Комфорт и Уют
-
Сад падающих звёзд: Тайваньская дорама, покорившая сердца зрителей по всему миру
-
Саранск: История, Культура и Жилье в Современном Городе
-
Что такое роялти во франшизе простыми словами
Комментарии