Библиотека Firmata и Arduino
- Подробности
- Категория: Arduino
- Опубликовано 02.06.2015 13:12
- Автор: Admin
- Просмотров: 6451
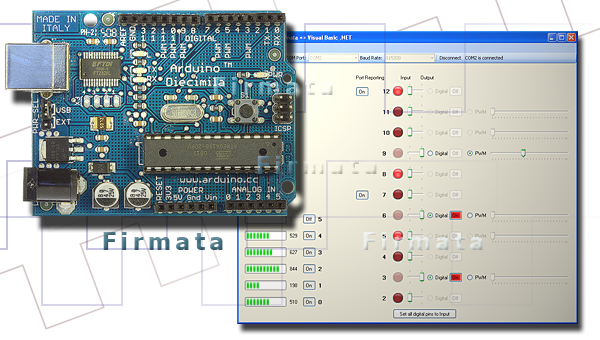
Библиотека Firmata предназначена для упрощения обмена информацией между ПК и Arduino при помощи специального протокола Firmata обмена данными. Эта библиотека уже есть в составе Arduino IDE. С ее помощью разработчик значительно облегчит себе жизнь, и избавится от необходимости писать свои собственные протоколы обмена данными между Arduino и компьютером.
Рассмотри основные функции данной библиотеки:
Запуск и инициализация библиотеки
void begin();
void begin(long);
long-cкорость обмена данными, по умолчанию имеет значение 57600.
Печать версии
voidprintVersion(void);
Передает компьютеру информацию о версии протокола.
Сигнализация верcии протокола
void blinkVersion(void);
Данные метод промигивает версию протокола на 13-м пине.
Отправка и версии и прошивки на ПК
void printFirmwareVersion(void);
Установка названия и версии прошивки
void setFirmwareNameAndVersion(const char *name, byte major, byte minor);
данные метод устанавливает название и версию прошивки исходя из названия скетча
Отправка данных на компьютер
Отправка аналоговое сообщение
void sendAnalog(byte pin, int value);
Отправка данных порта
void sendDigitalPort(byte portNumber, int portData);
Отправляет значение целого порта одним сообщением длиной в 8 бит.
void sendSysex(byte b1,byte b2, byte* bytev);
отсылаются в виде массива байт.
void sendString(const char* string);
отправка строки.
void sendString(byte command, const char* string);
отправка строки коммандного типа.
Получение данных
void available(void);
проверка наличии данных в буфере.
void processInput(void);
прочитать данные и отправить всем зарегистрированным функция-обработчикам.
void attach(byte command, callbackFunction newFunction);
void attach(byte command, systemResetCallbackFunction newFunction);
void attach(byte command, stringCallbackFunction newFunction);
void attach(byte command, sysexCallbackFunction newFunction);
методы установки функции обработчика для определенного типа данных.
void detach(byte command);
отмена фунции обработчика для определенного типа сообщения.
Сообщения к которым подключается функция обработчик
#define DIGITAL_MESSAGE 0x90 // данные цифрового порта (8-бит) #define ANALOG_MESSAGE 0xE0 // аналоговое значение пина (PWM) #define REPORT_ANALOG 0xC0 // включить/отключить отчет об аналоговом пине #define REPORT_DIGITAL 0xD0 // включить/отключить отчет о цифровом пине #define SET_PIN_MODE 0xF4 // установить режим пина: INPUT/OUTPUT/PWM/etc #define FIRMATA_STRING 0x71 // строка: stringCallbackFunction #define SYSTEM_RESET 0xFF // сообщение для перезагрузки прошивки: systemResetCallbackFunction
Пример программы которая получает и отправляет данные
#include <Firmata.h>
byte analogPin;
void analogWriteCallback(byte pin, int value)
{
pinMode(pin,OUTPUT);
analogWrite(pin, value);
}
void setup()
{
Firmata.setFirmwareVersion(0, 1);
Firmata.attach(ANALOG_MESSAGE, analogWriteCallback);
Firmata.begin();
}
void loop()
{
while(Firmata.available()) {
Firmata.processInput();
}
for(analogPin = 0; analogPin < TOTAL_ANALOG_PINS; analogPin++) {
Firmata.sendAnalog(analogPin, analogRead(analogPin));
}
}
Программа для одновременного управления сразу вумя сервиприводами
#include <Firmata.h>
#include <Servo.h>
Servo servo9;
Servo servo10;
void analogWriteCallback(byte pin, int value)
{
if(pin == 9)
servo9.write(value);
if(pin == 10)
servo10.write(value);
}
void setup()
{
Firmata.setFirmwareVersion(0, 2);
Firmata.attach(ANALOG_MESSAGE, analogWriteCallback);
servo9.attach(9);
servo10.attach(10);
Firmata.begin(9600);
}
void loop()
{
while(Firmata.available())
Firmata.processInput();
}
Данная программа получает пакет данных отправлеямых с компьютера через сериал соединение и управляет сервоприводами при помощи библиотеки Firmata.
Данные которые отсылаются с компьютера должны соответсвовать определенному формату или протоколу, описание протокола можно посмотреть на сайте Firmata firmata.org/wiki/Protocol.
Примеры пакета данных которые посылаются с компьютера
Установка определенного значения на выходе порта
uint8_t buf[3]; buf[0] = 0x90 | pin; buf[1] = val & 0x7F; buf[2] = (val >> 7) & 0x7F; port.Write(buf, 3);
Установка аналогового значения
uint8_t buf[3]; buf[0] = 0xE0 | pin; buf[1] = val & 0x7F; buf[2] = (val >> 7) & 0x7F; port.Write(buf, 3);
Установка состояния порта
uint8_t buf[4]; buf[0] = 0xF4; buf[1] = pin; buf[2] = mode; port.Write(buf, 3);
где:
- port- объект класса Serial для работы с COM портом;
- pin- номер вывода Arduino;
- val- определенное значение для передачи;
- mode - состояние порта.
Состояние порта mode может быть следующим:
#define MODE_INPUT 0x00 #define MODE_OUTPUT 0x01 #define MODE_ANALOG 0x02 #define MODE_PWM 0x03 #define MODE_SERVO 0x04 #define MODE_SHIFT 0x05 #define MODE_I2C 0x06
Категории
Полезные ссылки!
Справочные данные
Форма входа
Группа в ВК
Самые читаемые
- Схема металлоискателя пират
- Маркировка конденсаторов
- Трансформатор тесла своими руками. Как сделать трансформатор Тесла
- Простой усилитель звука
- Для чего нужен выключатель нагрузки? Совет от Electrolight
- Как работает транзистор?
- Схема простейшего радиоприемника
- Маркировка SMD транзисторов
- Подключение электретного микрофона
- Простой блок питания
Последние комментарии
-
Металлоискатель бабочка
-
27.05.2019 07:31
Из личного опыта: Количество витков катушек следует уменьшить. Максимальная чувствительност ь 15 см 5 ...
-
27.05.2019 07:31
-
Справочник отечественных диодов
-
30.05.2019 23:17
Очень понравилось. Всё удобно и доступно.
-
30.05.2019 23:17
-
Ультразвуковой дальномер, динамическая индикация и Arduino.
-
14.03.2019 12:18
А схемы подключения на fritzing есть? Подробного описания нет
-
14.03.2019 12:18
Последние материалы
Последнии темы форума
- Нет сообщений для показа
Новости радиомира
-
Арматура 6 мм: Применение, преимущества и советы по выбору
-
В прямом эфире: Остроумная комедия Ниши Ганатра о переменах, инклюзивности и второй жизни ночного шоу
-
Важность инженерно-геодезических изысканий в строительных проектах
-
Миниатюрный радиоприемник на основе графена
-
Покупка Квартиры в Анжеро-Судженске: Инвестиция в Комфорт и Уют
-
Сад падающих звёзд: Тайваньская дорама, покорившая сердца зрителей по всему миру
-
Саранск: История, Культура и Жилье в Современном Городе
-
Что такое роялти во франшизе простыми словами